






Pode visualizar graficamente os resultados dos volumes através da categoria de navegador Sólidos. Os resultados numéricos dos volumes encontram-se na categoria da tabela Resultados por sólidos.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformações
A imagem Resultados por sólidos na tabela mostra a tabela com as deformações das superfícies limite. Os deslocamentos e as rotações são apresentados nos pontos de grelha da superfície (ver capítulo Superfícies ).
As deformações significam:
| |u| | Valor absoluto do deslocamento total |
| uX | Deslocamento na direção do eixo X global |
| uY | Deslocamento na direção do eixo Y global |
| uZ | Deslocamento na direção do eixo Z global |
| φX | Rotação em torno do eixo X global |
| φY | Rotação em torno do eixo Y global |
| φZ | Rotação em torno do eixo Z global |
Tensões
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
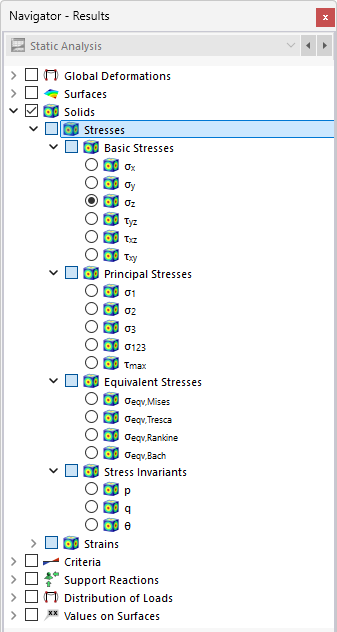
Defina no navegador quais as tensões que devem ser apresentadas nas superfícies limite dos sólidos. A tabela lista as tensões destas superfícies de acordo com as especificações definidas no Gestor de tabelas de resultados .
As tensões nos sólidos estão divididas nas seguintes categorias:
- Tensões básicas
- Tensões principais
- Tensões equivalentes
- Invariantes de tensão
Tensões básicas
As tensões em sólidos não podem ser descritas com equações simples como as tensões em superfícies. As tensões básicas σx, σy e σz, incluindo as tensões de corte τyz, τxz e τxy, são determinadas diretamente pelo núcleo de cálculo.
Se for cortado um cubo com comprimentos de aresta dx, dy e dz de um corpo sujeito a tensões multiaxiais, as tensões em cada face do cubo podem ser decompostas em tensões axiais e tensões de corte. Desprezando as forças de massa e também as diferenças de tensão em faces paralelas, o estado de tensão pode ser descrito por nove componentes de tensão no sistema de coordenadas local do cubo.
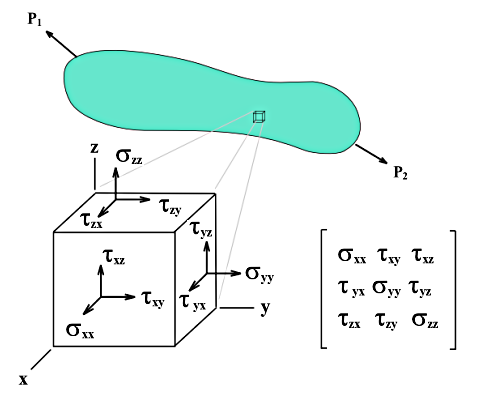
A matriz do tensor das tensões é:
Tensões principais
Dos valores próprios do tensor resultam as tensões principais σ1, σ2 e σ3 da seguinte forma:
A tensão de corte máxima τmax é determinada de acordo com o círculo de Mohr:
Tensões equivalentes
As tensões equivalentes σv segundo von Mises podem ser determinadas por duas fórmulas equivalentes.
Para a determinação da tensão equivalente σv segundo Tresca , as diferenças das tensões principais são examinadas para determinar o valor máximo.
A tensão equivalente σv segundo Rankine é determinada a partir dos maiores valores absolutos das tensões principais.
Para a determinação da tensão equivalente σv segundo Bach , as diferenças das tensões principais são examinadas considerando o coeficiente de Poisson ν para determinar o valor máximo.
Invariantes de tensão
As invariantes de tensão permitem uma descrição independente do sistema de coordenadas e, portanto, objetiva do estado de tensão de um material. Como grandezas escalares, permanecem inalteradas sob quaisquer rotações do sistema de coordenadas e capturam as propriedades fisicamente relevantes desses estados independentemente da representação tensorial escolhida. A sua importância especial reside no facto de muitos fenómenos mecânicos – particularmente o escoamento plástico, a falha e a fratura – não dependerem de componentes de tensão individuais, mas sim de grandezas invariantes. Assim, as invariantes de tensão constituem a base de numerosos critérios de escoamento e falha estabelecidos, como as teorias de von Mises, Tresca ou Drucker-Prager.
A tensão média p está associada à primeira invariante de tensão I1 e descreve a tensão hidrostática. Resulta da média aritmética das três tensões principais e representa a distância do ponto de tensão à origem das coordenadas na diagonal do espaço.
Caracteriza o estado médio de tensões axiais e é responsável principalmente pelas alterações de volume. Fisicamente, p corresponde a um estado uniforme de compressão ou tração que não causa alteração de forma, mas apenas compressão ou dilatação. Em muitos materiais, particularmente na mecânica dos solos e rochas, bem como em materiais sensíveis à pressão, p influencia significativamente o comportamento de resistência e deformação.
A tensão desviadora q está associada à segunda invariante do tensor desviador de tensões J2. É calculada da seguinte forma:
|
I1 |
Primeira invariante de tensão |
|
I2 |
Segunda invariante da tensão |
|
J2 |
Segundo invariante de tensão desviatória |
Descreve a parte do estado de tensão que é responsável pelas alterações de forma (distorções de corte) sem alterar o volume. A componente desviadora impulsiona especialmente o escoamento plástico e a falha em materiais dúcteis. O critério de escoamento de von Mises baseia-se diretamente em J2 ou q e ilustra que a deformação plástica é controlada principalmente por tensões desviadoras.
O ângulo de Lode θ indica a posição do ponto de tensão no plano desviador. O plano desviador é dividido em seis setores, de modo que −30° ≤ θ ≤ 30° é válido. O ângulo é determinado da seguinte forma:
|
J2 |
Segunda invariante de tensão desviatória: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
Terceira invariante de tensão desviatória: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
Uma solicitação de corte puro resulta em θ = 0, enquanto para θ = 30° ocorre o estado de tensão σ1 > σ2 = σ3, que corresponde a um ensaio de compressão triaxial. De θ = −30° resulta o estado de tensão de um ensaio de tração triaxial com σ1 < σ2 = σ3.
Deformações totais
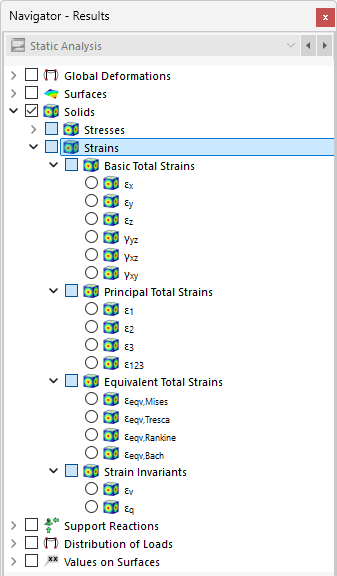
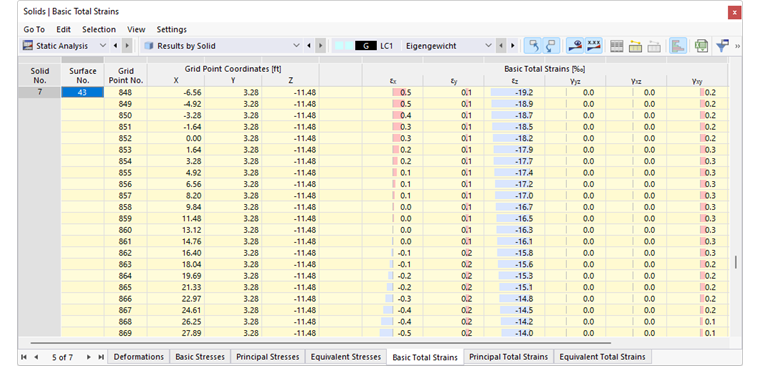
Defina no navegador quais as deformações totais que devem ser apresentadas nas superfícies limite dos sólidos. A tabela lista as extensões totais destas superfícies de acordo com as especificações definidas no Gestor de tabelas de resultados .
As deformações totais dos sólidos estão divididas nas seguintes categorias:
- Extensões totais básicas
- Extensões totais principais
- Extensões totais equivalentes
- Invariantes de extensão
Extensões totais básicas
As extensões totais básicas, incluindo as distorções de corte, são determinadas diretamente pelo núcleo de cálculo. Para o estado de deformação tridimensional, a definição geral do tensor é:
Os elementos do tensor são definidos da seguinte forma:
Extensões totais principais
Das extensões totais básicas, são determinadas as extensões totais principais ε1, ε2 e ε3.
Extensões totais equivalentes
As extensões totais equivalentes εv são determinadas da seguinte forma, de acordo com quatro hipóteses de tensão diferentes.
|
R |
Matriz (ver abaixo) |
|
R |
Matriz (ver abaixo) |
Invariantes de extensão
As invariantes de extensão são parâmetros característicos do tensor de extensões que permanecem independentes da orientação do sistema de coordenadas. Permitem uma separação clara entre a alteração de volume e a alteração de forma de um material. A distinção é central para a análise do comportamento do material, critérios de resistência e modelos de plasticidade.
A invariante de extensão volumétrica εv corresponde à parte isotrópica das extensões totais. É determinada a partir das extensões totais principais:
As extensões desviadoras εq ou também extensões de corte γs descrevem a pura alteração de forma sem alteração de volume. São calculadas da seguinte forma: