






接触实体允许您控制在平行面之间传递的力以及传递的方式。
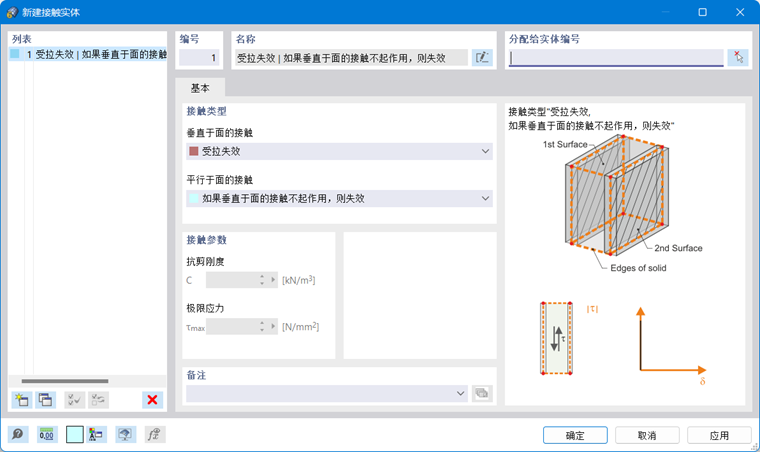
接触类型
用户可以在该面板中定义两个面之间的力的传递方式。
程序在“垂直于面的接触”控制着面与面之间拉力和压力的传递,下拉菜单中提供了以下选项供用户选择:
- 完整的力传递
- 受拉撕裂
- 受压撕裂
例如,用户可以使用“受拉失效”来模拟只受压力的端板。
程序通过控制实体单元有限元网格的变形来模拟受拉失效和受压失效。
“平行于面的接触”控制着面与面之间剪力的传递, 用户可以在“方向类型”下拉菜单中选择旋转线栅格的方式:
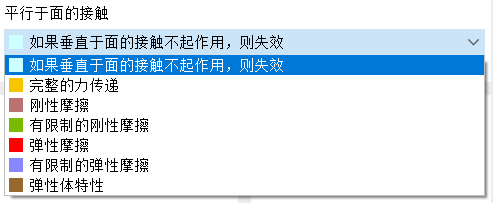
接触类型和相应说明如下:
| 联系我们 | 图表 | 项目介绍 |
|---|---|---|
| 如果垂直于面的接触不起作用,则失效 | 如果受拉或受压接触实体失效,则不会传递剪力。 | |
| 完整的力传递 | 传递所有剪力。 | |
| 刚性摩擦 | 刚性摩擦立即生效。 剪应力大小取决于正应力。 使用该类型时,需指定摩擦系数μ。使用该类型时,两个面平行方向上被刚性连接,无法产生互相移动。 | |
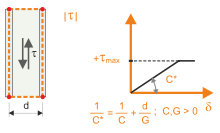
| 有限制的刚性摩擦 | 一旦达到'极限应力' τmax ,应力就不再随着变形的增加而增加,而是保持恒定。 | |
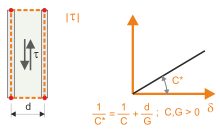
| 弹性摩擦 | 摩擦表现出弹性行为,其中剪切力与变形成正比。 使用该类型时,两个面平行方向上可以产生互相移动。 输入'抗剪刚度' C(将 1 m2移动 1 m 的力)和'摩擦系数' μ 作为参数。 | |
| 有限制的弹性摩擦 | 剪力与变形成正比增加,直到达到许用剪应力。 不再随变形进一步增加,进入屈服状态保持恒定。 输入 '抗剪刚度' C 和 '极限应力' τmax作为参数。 | |
| 弹性实体行为 | 弹性剪力传递的属性可以通过参数'抗剪刚度' C 来描述。 |


接触参数
用户可以在该部分输入“平行于面的接触”有关的参数。 接触类型和相关参数可以参见上表。