Пользовательские системы координат облегчают ввод частей модели, которые не расположены ни в одной из глобальных плоскостей осей. Они не имеют отношения к системам осей линий, стержней или поверхностей.
По умолчанию используется система координат 'Глобальная XYZ', связанная с глобальными осями XYZ и началом координат.
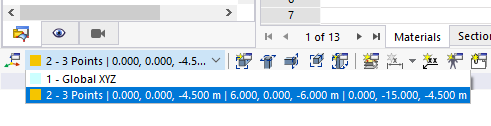
Вы также можете вызвать диалог 'Система координат' с помощью кнопки
![]() рядом со списком систем координат (см. изображение Выбор системы координат).
рядом со списком систем координат (см. изображение Выбор системы координат).
Тип системы координат
Список предлагает несколько способов определения системы координат:
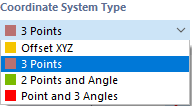
- Смещение XYZ: Начало глобальной системы координат XYZ переносится в другую точку.
- 3 точки: Система координат определяется тремя точками.
- 2 точки и угол: Система координат определяется двумя точками через плоскость и угол вращения.
- Точка и угол: Система координат определяется одной точкой и тремя углами вращения глобальных осей.
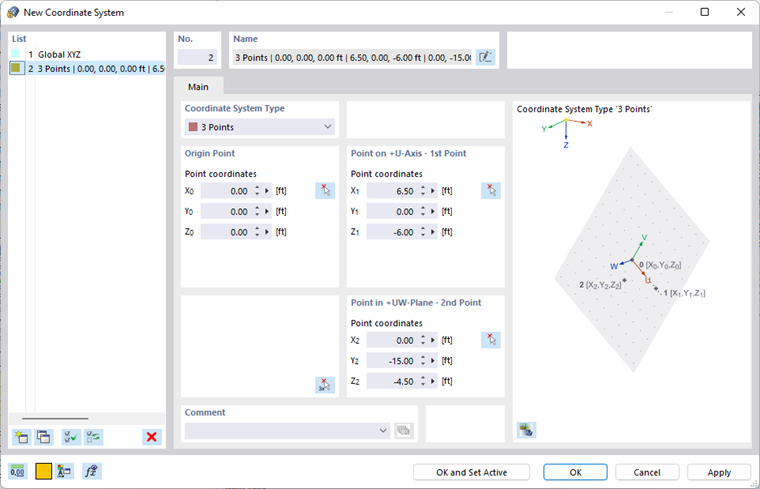
Начальная точка
Укажите нулевую точку новой системы координат или задайте её графически с помощью кнопки
![]() .
.
Точки / Вращение
В следующих разделах можно задать точки или углы вращения в зависимости от типа системы координат. Обратите внимание, что три точки не должны лежать на одной прямой.
Оси пользовательской системы координат обозначаются как U, V и W (см. графику в диалоге Новая система координат).
Пример
Чтобы определить систему координат для плоскости крыши, установите 'Начальную точку' в углу рамы. В качестве 'Точки на +U-оси' выберите конёк соответствующей балки, а в качестве 'Точки в +UW-плоскости' - другой угол рамы на той же стороне зала.
Сетка относится к рабочим плоскостям UV, VW и UW, в которых вы можете определять новые объекты.
В списке внизу слева на CAD-панели инструментов можно переключаться между системами координат.