






Un appui surfacique décrit l’appui de tous les éléments 2D d’une surface. Les déplacements de ces éléments peuvent être empêchés ou limités par des ressorts.

Général
L’onglet Général permet de gérer les paramètres élémentaires de l’appui.
Conditions d’appui
Les conditions d’appui sont divisées en degrés de liberté « Translation » et « Cisaillement ». Pour définir un appui, cochez la case pour l’axe concerné. La coche signifie que le degré de liberté est verrouillé et que le déplacement de l’élément dans la direction de cet axe de surface n’est pas possible.
Si aucun appui ni maintien de cisaillement n’est disponible, décochez la case correspondante. La constante du ressort de translation ou de cisaillement sera alors définie à zéro. Vous pouvez adapter la « constante de ressort » à tout moment pour modéliser un appui élastique de la surface. Entrez les raideurs des ressorts comme valeurs de calcul.
Les paramètres Cu,x et Cu,y représentent les ressorts de translation décrivant la résistance de fondation contre le déplacement de la surface dans les directions x ou y. Dans le cas d'une dalle de plancher, vous pouvez les utiliser pour définir la résistance (indépendante de la charge) dans les directions horizontales.
Les symboles d’appui sont toujours affichés sous la surface pour une surface horizontale ou inclinée (c’est-à-dire du côté en direction de la gravité). Dans le cas d’une surface verticale, l’orientation de l’axe de surface z est déterminante. Cependant, un échec agit indépendamment de l’affichage graphique : le critère de contrainte, basé sur l’orientation de l’axe z local, est déterminant.
Pour la direction « uz », une non-linéarité peut être définie (voir l’image Nouvel appui surfacique). Le critère « Échec si la contrainte de contact σz est négative ou positive » contrôle si l'appui ne peut absorber que des contraintes positives ou négatives. Vous pouvez définir d'autres paramètres de non-linéarité dans l’onglet uz - Échec si la contrainte de contact σz est négative ou positive.
Vérifiez l’orientation des axes z locaux lors de l’application des critères d’échec. Vous pouvez afficher et masquer les axes de surface à l'aide du menu contextuel de la surface.
Les conditions d’appui pour le « Cisaillement » vxz et vyz contrôlent la manière dont la résistance au cisaillement de l’appui dans la direction des axes de surface x et y est prise en compte. Dans la plupart des cas, la constante de Pasternak Cv est comprise entre 0,1 ⋅ Cu, z (capacité de cisaillement faible) et 0,5 ⋅ Cu, z (capacité de cisaillement moyenne). En règle générale, les dispositions suivantes s’appliquent : Cv,xz = Cv,yz.
Pour un appui inamovible en uz, les éléments de cisaillement correspondants de la matrice de rigidité sont activés automatiquement.
Le tableau suivant selon Kolar [1] propose des valeurs indicatives pour les constantes de ressort des sols.
| Consistance du sol | Cu,z [kN/m3] | Cv [kN] | Cv [kN] | Cv [kN] |
|---|---|---|---|---|
| minimal | moyen | élevé | ||
| très mou | 1 000 | 0 | 500 | 1 000 |
| moyennement dense | 10 000 | 0 | 5 000 | 10 000 |
| dense | 100 000 | 0 | 50 000 | 100 000 |
uz - uz - Échec si la contrainte de contact σz est négative ou positive
Cet onglet permet de décrire plus précisément l’échec - uz comme propriété non linéaire de l’appui surfacique (voir l’image Nouvel appui surfacique).
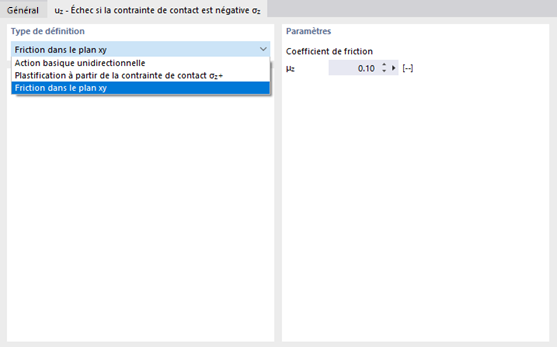
La liste offre les options suivantes :
- Action basique unidirectionnelle : l’appui est en échec en cas de contraintes de contact négatives ou positives.
- Plastification à partir de la contrainte de contact : l’appui est en échec dans le cas de contraintes de contact négatives ou positives et n’est efficace dans l’autre zone jusqu’à une certaine contrainte seulement. Au-delà, les déformations augmentent, mais pas les contraintes.
- Frottement dans le plan xy : l’appui est en échec en cas de contraintes de contact négatives ou positives. Les efforts tranchants sont absorbés par la friction. Ils dépendent des forces de contact existantes. La relation suivante s’applique : τ = μz ⋅ σ. L’appui dans les directions x et y n’est totalement pris en compte que lorsque la contrainte de contact τ est atteinte. Cela signifie qu’un appui rigide ou élastique dans les directions horizontales x et y doit également être défini. Sans cet appui, aucun frottement dans le plan n’est actif.