






È possibile visualizzare graficamente i risultati per i volumi tramite la categoria del navigatore Solido. I risultati numerici dei volumi sono disponibili nella categoria della tabella Risultati per solido.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformazioni
L'immagine Risultati per solido nella tabella mostra la tabella con le deformazioni delle superfici di contorno. Gli spostamenti e le rotazioni sono forniti nei punti della griglia della superficie (vedere il capitolo Superfici ).
Le deformazioni significano:
| |u| | Valore assoluto dello spostamento totale |
| uX | Spostamento nella direzione dell'asse globale X |
| uY | Spostamento nella direzione dell'asse globale Y |
| uZ | Spostamento nella direzione dell'asse globale Z |
| φX | Rotazione attorno all'asse globale X |
| φY | Rotazione attorno all'asse globale Y |
| φZ | Rotazione attorno all'asse globale Z |
Tensioni
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
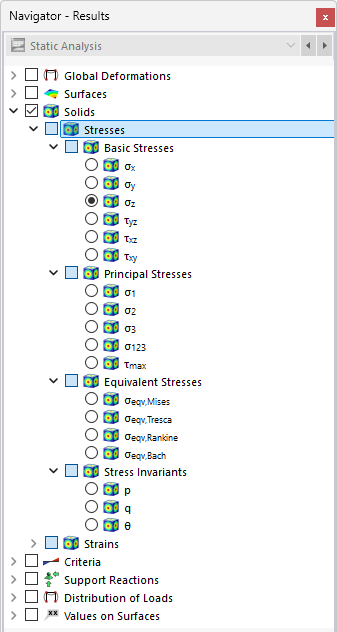
Specificare nel navigatore quali tensioni visualizzare sulle superfici di contorno dei volumi. La tabella elenca le tensioni di queste superfici secondo le impostazioni definite nel Gestore tabelle risultati .
Le tensioni del solido sono suddivise nelle seguenti categorie:
- Tensioni di base
- Tensioni principali
- Tensioni equivalenti
- Invarianti delle tensioni
Tensioni di base
Le tensioni del solido non possono essere descritte con semplici equazioni come le tensioni superficiali. Le tensioni di base σx, σy e σz, comprese le tensioni tangenziali τyz, τxz e τxy, sono determinate direttamente dal kernel di calcolo.
Se un cubo con lunghezze dei bordi dx, dy e dz viene ritagliato da un corpo sollecitato in modo multiassiale, le tensioni in ciascuna faccia del cubo possono essere scomposte in tensioni assiali e tangenziali. Trascurando le forze di volume e anche le differenze di tensione sulle facce parallele, lo stato tensionale può essere descritto nel sistema di coordinate locale del cubo da nove componenti di tensione.
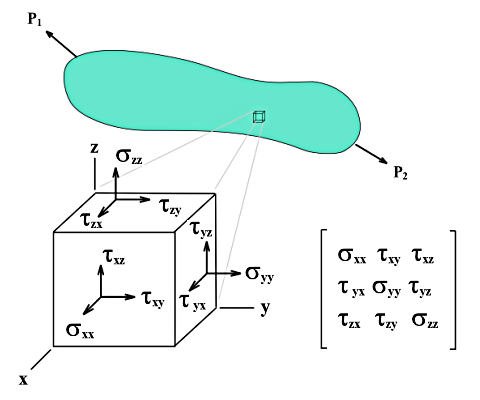
La matrice del tensore delle tensioni è:
Tensioni principali
Dai valori propri del tensore si ottengono le tensioni principali σ1, σ2 e σ3 come segue:
La massima tensione tangenziale τmax è determinata secondo il cerchio di Mohr:
Tensioni equivalenti
Le tensioni equivalenti σv secondo von Mises possono essere determinate da due formule equivalenti.
Per la determinazione della tensione equivalente σv secondo Tresca , vengono esaminate le differenze delle tensioni principali per determinare il valore massimo.
La tensione equivalente σv secondo Rankine è determinata dai massimi valori assoluti delle tensioni principali.
Per la determinazione della tensione equivalente σv secondo Bach , le differenze delle tensioni principali sono esaminate tenendo conto del coefficiente di Poisson ν, per determinare il valore massimo.
Invarianti delle tensioni
Le invarianti delle tensioni consentono una descrizione indipendente dalle coordinate e quindi oggettiva dello stato tensionale di un materiale. In quanto grandezze scalari, rimangono invariate sotto rotazioni arbitrarie del sistema di coordinate e colgono le proprietà fisicamente rilevanti di questi stati indipendentemente dalla rappresentazione tensoriale scelta. La loro particolare importanza risiede nel fatto che molti fenomeni meccanici – in particolare lo scorrimento plastico, il cedimento e la frattura – non dipendono dalle singole componenti di tensione, ma da misure invarianti. Pertanto, le invarianti delle tensioni costituiscono la base di numerosi criteri di snervamento e cedimento consolidati, come le teorie di von Mises, Tresca o Drucker-Prager.
La tensione media p è legata alla prima invariante delle tensioni I1 e descrive la tensione idrostatica. Risulta dalla media aritmetica delle tre tensioni principali e rappresenta la distanza del punto di tensione dall'origine delle coordinate sulla diagonale spaziale.
Essa caratterizza lo stato medio di tensione assiale ed è significativamente responsabile delle variazioni di volume. Fisicamente, p corrisponde a uno stato uniforme di compressione o trazione che non causa alcuna modifica della forma, ma esclusivamente compressione o dilatazione. In molti materiali, in particolare nella meccanica dei terreni e delle rocce, così come nei materiali sensibili alla pressione, p influenza significativamente il comportamento di resistenza e deformazione.
La tensione deviatorica q è legata alla seconda invariante del deviatore delle tensioni J2. Si determina come segue:
|
I1 |
Primo invariante di tensione |
|
I2 |
Seconda invariante di tensione |
|
J2 |
Seconda invariante di tensione deviatric |
Essa descrive la parte dello stato tensionale responsabile delle modifiche della forma (distorsioni taglianti), senza variare il volume. La parte deviatorica guida in particolare lo scorrimento plastico e il cedimento nei materiali duttili. Il criterio di snervamento di von Mises si basa direttamente su J2 o q e chiarisce che la deformazione plastica è controllata principalmente dalle tensioni deviatoriche.
L'angolo di Lode θ indica la posizione del punto di tensione nel piano deviatorico. Il piano deviatorico è suddiviso in sei settori, quindi vale −30° ≤ θ ≤ 30°. L'angolo è determinato come segue:
|
J2 |
Seconda invariante delle tensioni deviatoriche: 1/6 [(σ1 – σ2)2 + (σ2 – σ3)2 + (σ3 – σ2)2] |
|
J3 |
Invariante di tensione deviatorica del terzo ordine: 1/27 (2σ1 – σ2 – σ3) (2σ2 – σ3 – σ1) (2σ3 – σ1 – σ2) |
Uno stato di taglio puro si ottiene per θ = 0, mentre per θ = 30° si verifica lo stato tensionale σ1 > σ2 = σ3, che corrisponde a una prova di compressione triassiale. Da θ = −30° risulta lo stato tensionale di una prova di trazione triassiale con σ1 < σ2 = σ3.
Distorsioni
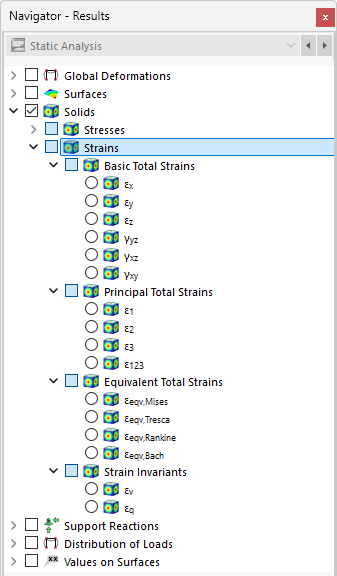
Specificare nel navigatore quali distorsioni visualizzare sulle superfici di contorno dei volumi. La tabella elenca le deformazioni di queste superfici secondo le impostazioni definite nel Gestore tabelle risultati .
Le distorsioni del solido sono suddivise nelle seguenti categorie:
- Deformazioni totali di base
- Deformazioni totali principali
- Deformazioni totali equivalenti
- Invarianti delle deformazioni
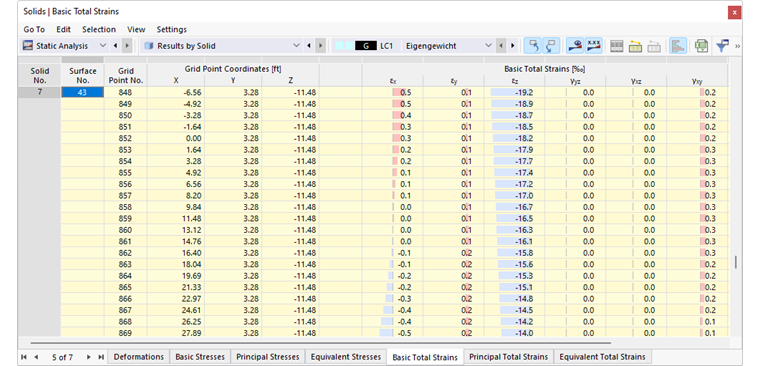
Deformazioni totali di base
Le deformazioni totali di base, comprese le distorsioni tangenziali, sono determinate direttamente dal kernel di calcolo. Per lo stato di distorsione spaziale, la definizione generale del tensore è:
Gli elementi del tensore sono definiti come segue:
Deformazioni totali principali
Dalle deformazioni di base si determinano le deformazioni totali principali ε1, ε2 e ε3.
Deformazioni totali equivalenti
Le deformazioni totali equivalenti εv sono determinate come segue secondo quattro diverse ipotesi di resistenza.
|
R |
Matrice (vedi sotto) |
|
R |
Matrice (vedi sotto) |
Invarianti delle deformazioni
Le invarianti delle deformazioni sono valori caratteristici del tensore delle deformazioni che rimangono indipendenti dall'orientamento del sistema di coordinate. Consentono una chiara separazione tra variazione di volume e modifica della forma di un materiale. La distinzione è centrale per l'analisi del comportamento del materiale, dei criteri di resistenza e dei modelli di plasticità.
L'invariante volumetrica delle deformazioni εv corrisponde alla parte isotropa della deformazione totale. È determinata dalle deformazioni principali:
Le deformazioni deviatoriche εq o anche le distorsioni taglianti γs descrivono la pura modifica della forma senza variazione di volume. Si determinano come segue: