Les systèmes de coordonnées définis par l’utilisateur facilitent l’entrée des parties du modèle qui ne se trouvent dans aucun des plans d’axes globaux. Ils n’ont rien à voir avec les systèmes d’axes des lignes, barres ou surfaces.
Par défaut, le système de coordonnées est basé sur les axes globaux XYZ et l’origine, appelé « Global XYZ ».
Vous pouvez également accéder à la boite de dialogue « Système de coordonnées » à l’aide du bouton
![]() à côté de la liste des systèmes de coordonnées (voir l’image Sélectionner le système de coordonnées).
à côté de la liste des systèmes de coordonnées (voir l’image Sélectionner le système de coordonnées).
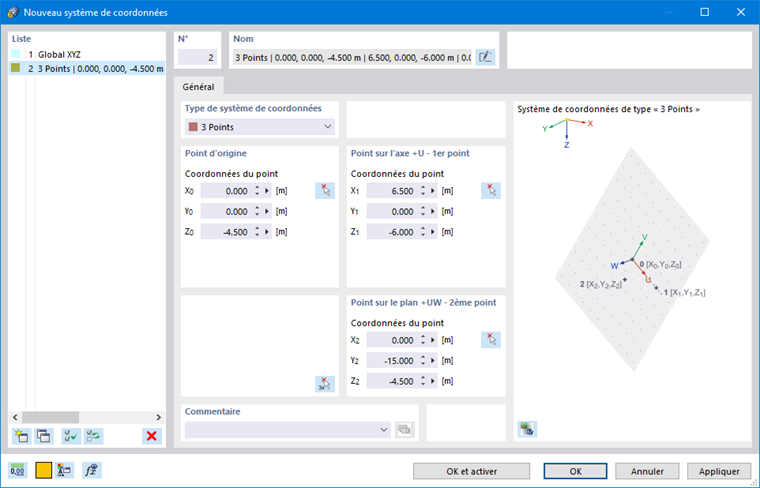
Type de système de coordonnées
La liste offre plusieurs options pour définir un système de coordonnées :
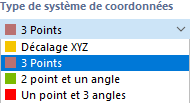
- Décalage XYZ : l’origine du système de coordonnées XYZ global est déplacée vers un autre point.
- 3 points : le système de coordonnées est défini par trois points.
- 2 points et angle : le système de coordonnées est défini par deux points via un plan et un angle de rotation.
- Point et angle : le système de coordonnées est défini par un point et trois angles de rotation des axes globaux.
Point d’origine
Indiquez le point zéro du nouveau système de coordonnées ou définissez-le graphiquement à l’aide du bouton
![]() .
.
Points / Rotation
Dans les parties suivantes, vous pouvez définir les points ou les angles de rotation selon le type de système de coordonnées. Notez que les trois points ne doivent pas être alignés droits.
Les axes d’un système de coordonnées défini par l’utilisateur sont appelés U, V et W (voir le graphique dans la boite de dialogue Nouveau système de coordonnées).
Exemple
Pour définir un système de coordonnées pour le plan de toiture, placez le « Point d’origine » dans un angle du portique. Comme « Point sur l’axe +U », sélectionnez le nœud de faîtage de la poutre correspondante et comme « Point dans le plan +UW », un autre angle du portique du même côté de la halle.
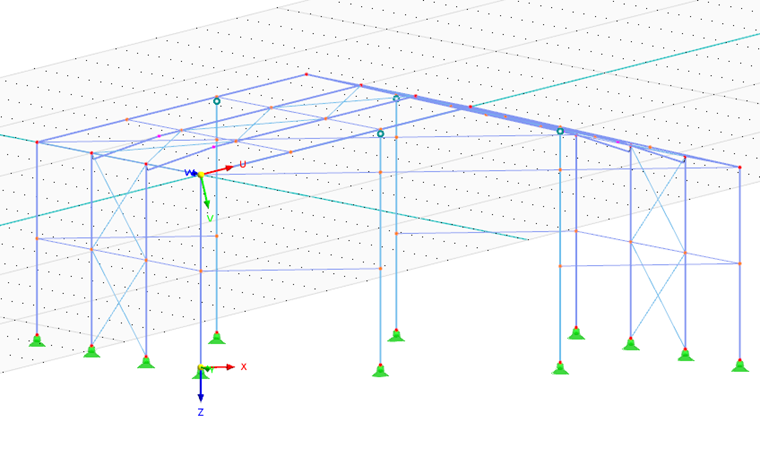
La grille est relative aux plans de travail UV, VW et UW dans lesquels vous pouvez définir de nouveaux objets.
Dans la liste en bas à gauche de la barre d’outils CAD, vous pouvez basculer entre les systèmes de coordonnées.