






The surface contact type controls the forces that are transferred between two groups of parallel surfaces ("surface contacts").
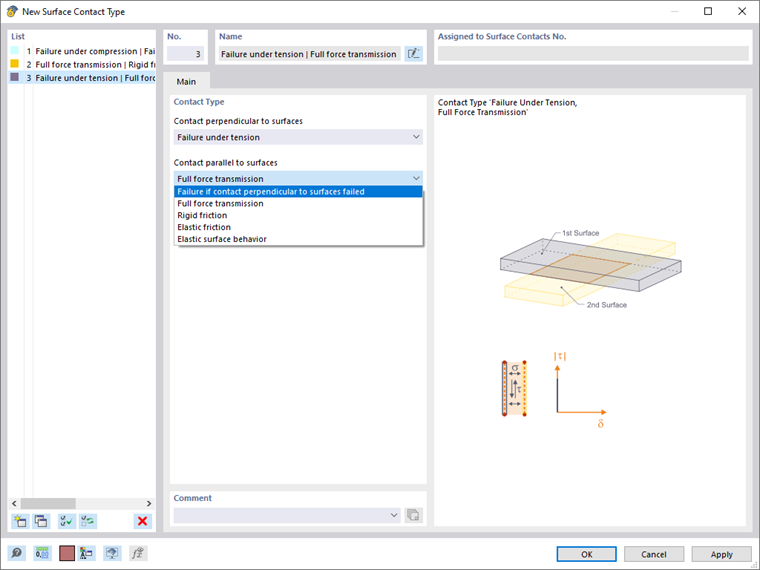
In the "Contact Type" dialog section, set the contact properties that are perpendicular and parallel to the surfaces.
Contact Perpendicular to Surfaces
In the "Contact perpendicular to surfaces" list, you can select from three options by which you can control the transfer of forces between the surfaces.
Full force transmission
Both tensile and compressive forces are transferred between the surfaces.
Failure under tension
The contact is released as soon as the surfaces move away from each other.
Failure under compression
Only tensile forces are transferred between the surfaces.
Contact Parallel to Surfaces
The options in the "Contact parallel to surfaces" list (see the image New Surface Contact Type) describe how shear forces are transferred between the surfaces.
Failure if contact perpendicular to surfaces failed
If there is no tension or compression contact between the surfaces, no shear forces are transferred.
Full force transmission
All shear forces are transferred, regardless of whether the contact is effective perpendicular to the surfaces.
Rigid Friction
In the "Rigid Friction" tab, define the parameters of the contact parallel to the surfaces.
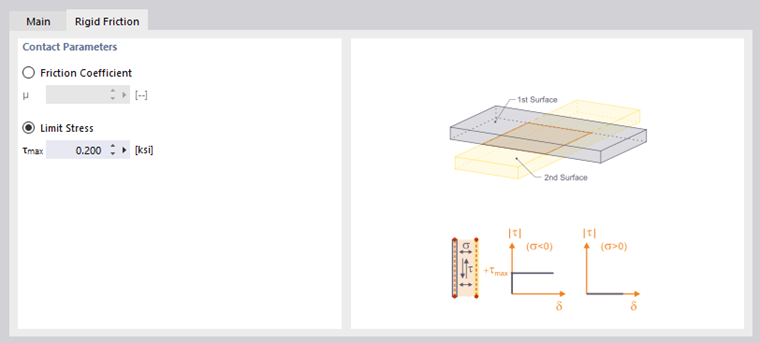
- Friction Coefficient μ: The transferred shear forces are related to the axial forces acting perpendicular to the surface. Specify the coefficient μ for this ratio of shear stresses (τ = μ ⋅ |σ|).
- Limit Stress τmax: As soon as the maximum allowable shear stress is reached, the stress is not increased any further by increasing the deformation, but remains constant.
The rigid friction is immediately effective. Shear stress depends on normal stress. The "Friction Coefficient" μ needs to be specified.
Elastic Friction
In the "Elastic Friction" tab, define the parameters of the contact parallel to the surfaces for which the shear force increases proportionally to the deformation. The entry is similar to the display shown in the image Rigid Friction. Since an elastic behavior is represented, it is also necessary to specify the constant of the shear stiffness C. It represents the force required to move an area of 1 m² by 1 m.
Elastic Surface Behavior
In the "Elastic Behavior" tab, define the parameters of the contact parallel to the surfaces.
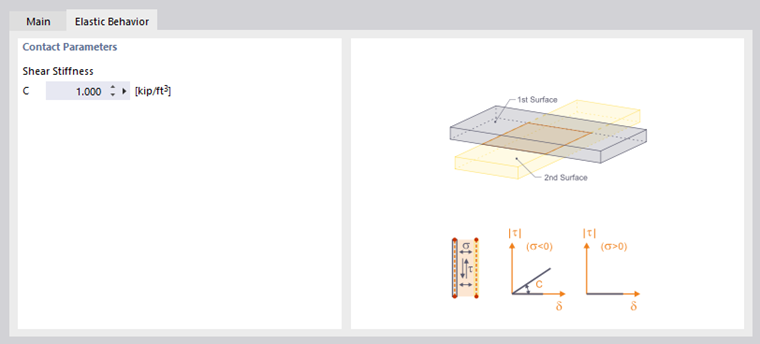
Specify the shear stiffness C of the spring to describe the property of the elastic transfer of shear forces.