






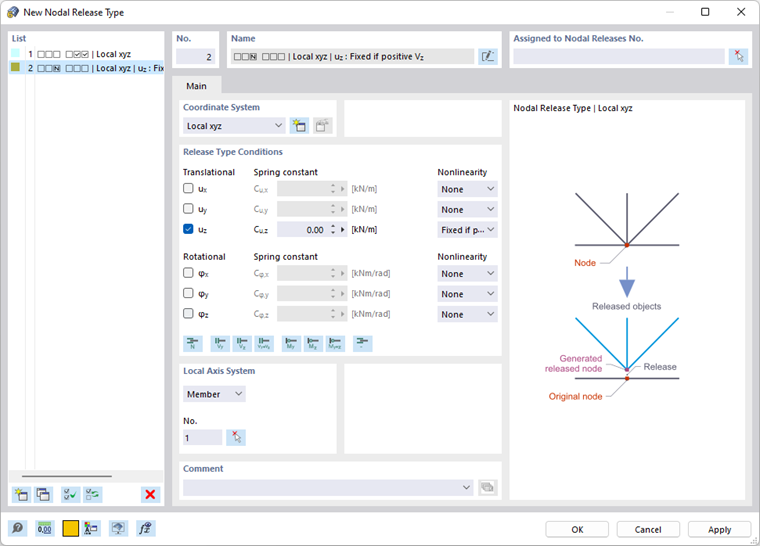
Dla każdego zwolnienia węzła należy określić właściwości kontrolujące przenoszenie odkształceń (a tym samym sił wewnętrznych) między pierwotnym węzłem a jego kopią. Ten typ zwolnienia węzła opisuje właściwości połączenia na niewidocznym pręcie między dwoma węzłami.
Układ współrzędnych
Zwolnienie przemieszczeń i obrotów może być powiązane z jednym z następujących układów osi:
- Lokalny układ osi pręta lub linii x, y, z
- Globalny układ współrzędnych X,Y,Z
- Układ współrzędnych zdefiniowany przez użytkownika U,V,W
Jeżeli używany jest lokalny pręt lub liniowy układ osi, należy wprowadzić numer odpowiedniego obiektu w sekcji Lokalny układ osi.
Warunki typu zwolnienia
Warunki typu zwolnienia są podzielone na stopnie swobody 'Translacyjne' i 'Rotalne'. Te pierwsze opisują przemieszczenia w kierunku lokalnych lub globalnych osi, a drugie - obroty wokół tych osi.
Aby zdefiniować zwolnienie, należy zaznaczyć pole wyboru dla odpowiedniej osi. Znacznik symbolizuje możliwość przesuwania lub obracania obiektu w odpowiednim kierunku lub wokół niego. Stała sprężyny translacyjnej lub obrotowej zostaje wówczas ustawiona na zero. 'Stałą sprężystości' można w każdej chwili zmienić, aby zamodelować przegub sprężysty. Sztywności sprężyste należy wprowadzić jako wartości obliczeniowe.
W kolumnie 'Nieliniowość' można sterować zwolnieniem dla każdej składowej deformacji. W zależności od stopnia swobody na liście nieliniowości dostępne są odpowiednie opcje.
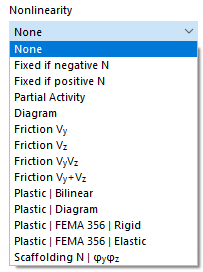
Nieliniowości zostały opisane w rozdziale Opisane przeguby na końcach pręta .
Lokalny układ osiowy
Ten przekrój jest wyświetlany, jeśli udział dotyczy lokalnego układu współrzędnych. Z listy należy wybrać, czy jako odniesienie ma zostać użyty 'pręt' czy 'linia'. Następnie wprowadź numer pręta lub linii. Za pomocą przycisku
![]() można również zdefiniować obiekt graficznie.
można również zdefiniować obiekt graficznie.